| 天文导航具有独有的优厚性是GPS等无线电导航系统无法相比的。它不错四肢零丁的一套导航系统。 三视场结构布局在 定位定向方面更为可靠 , 定位定向精度高。三视场系统由于有视场个数的冗余, 当其中某一视场受到杂光或者云层干与时, 其余视场仍然约略通俗职责, 抗干与本事强; 而且当某一视场指向星点漫衍比较寥落的天区, 导致该视场内不雅测星点数目少而无法完成星图识时, 不错鸠合其他视场中的星点, 通过三个子星图数据和会的步调完成星图识别进而普及测量的成果。 
三视场结构的优点除此以外还有:分视场的视场角不错更小, 以缩小天外配景杂音, 并普及测量精度。 故三视场定位定向系统愈加健壮。 文中以三视场定位定向确立自己四肢谋划载体, 给与三视场光学系统结构进行多传感器的测量来完成定位定向。 水平倾角传感器测量水平歪斜角 ρ、τ。 水平歪斜角传感器是商用的全温补高精度数字倾角测量确立, 它的详尽精度由多半实验测量细则。 它标称的单轴圭臬差为0.005° (±10°) 、0.003° (±7°) 、0.001° (±3°) 。由于测量次数未几, 其应合乎t漫衍。水平歪斜角的测量纰缪会影响到定位定向信息对中 
的蓄意精度。 确立的时期由时期通讯系统提供。 在GPS有信号时, 通过GPS转变系统时期。 时期通讯系统的精度为10-11s , 而曝光时期锁存的极限纰缪为4.8 μs 。 由于莫得任何可参考的纰缪模子, 故以均匀漫衍对待。 
因为67 ms的天下配合时纰缪会引起恒星在真春分点赤说念坐标系下约1″的纰缪, 故上述时期系统纰缪引起的恒星矢量Vγ的极限纰缪为7.2×10-5″ 。 它对恒星位置由Cγ到CTIRS的调节影响也很微弱, 最终对定位定向信息对 中 
的蓄意影响在毫角秒的级别,引起的位置纰缪在1 dm以下。 是以在定位定向的仿真分析中忽略时期纰缪酿成的影响。 温湿压传感器测量大气参数, 用于大气折射转变。 由确立制造商提供, 其标称的纰缪如下: 温度输出的标 准差为0. 2 ℃ ; 湿度输出的标 准差为2%RH; 
大气压测量输出的圭臬差为0. 3 h Pa 。 大气测量参数合乎正态漫衍。大气参数测量的精度影响大气转变的精度, 对定位定向信息对中 
酿成影响。 在信噪比为10 d B时, 质心定位在x、y重量标的的圭臬差为0.051, 合乎正态漫衍 , 此由确立 标定测试时获取。质心索求的精度影响了星角距的蓄意精度, 进而影响了星图识别。 另外质心索求的精度影响到定位定向信息对中的蓄意精度。 光学系统 标定参数 包括三个 视场的焦 距fci、 主点、 畸变参数、 光轴在载体中的单 位矢量Axi Veci=[cos (Ai) cos (Ei) , sin (Ai) cos (Ei) , sin (Ei) ]T, 以及探伤器装配角。 这些参数由标定获取 , 光学系统参数的标定纰缪 通过公式2、3传递 , 影响到真值VB的蓄意。 
标定参数的优化值{fci、KPi、Dti、Ai、 Ei、Fix Angi}′ 是通过多个星点组成的 {PtImg, VB} 通过优化分析得到的, 此时由PtImg通过公式2、3不错得到估量值VB′ 。光学系统标定参数的纰缪不错由估量值VB′ 与真值VB之间连接暗示。 通过标定实验数据的称身分析发现:在空间中VB′ 绕着VB在其周围就地漫衍。 VB与VB′ 之间的角距合乎正态漫衍 , 均值为1.710″ , 圭臬差为1.153″;VB′ 相对VB的地点角是在 0° , 360° 之间均匀漫衍 。即估量值VB′ 以VB为轴, 角距差为半径, 在其圆周上就地漫衍。 
极移参数由国外地球自转和参考系行状处提供, 精度可由其发布的公告A给出。 若使用公告A的数据, 那么一般来讲异日40天的计划极移极限纰缪不进步0.02″, 将其视为均匀漫衍。自不雅测以来极移参数规模:xp∈ (-0.4″, 0.4″) , yp∈ (-0.3", 0.6″)。 若无法正确获取公告A的内容则需要将极移参数树立为0, 那么公式6中CTIRS至CITRS的调节矩阵为单元矩阵。 在蓄意分析中若忽略极移, 则极移数值亦然蓄意的纰缪源之一。 
垂线偏差 (η, ξ) 的数据来 自于好意思国 国度地舆 重力模子斥地小组。 其发布了地球重力场EGM2008的数据, 粉饰寰球。 其中 η 重量的纰缪 △η 为正态漫衍, 且 △η~N (0.663, 0.723) ;ξ 重量的纰缪 △ξ 也为正态漫衍 △ξ~N (0.659, 0.724) 。 在蓄意中给与修正的Bennett大气折射转变公式 , 其极限纰缪为0.9″, 其纰缪漫衍莫得参考 , 以均匀漫衍对待。 它主要影响到蒙气差转变后的恒星矢量 
的准确性。 文中恒星位置是在国外天文坐标系框架下, 给与IAU2000B的岁差章动模子蓄意得回的。 恒星在真春分点赤说念坐标系中位置矢量Vγ的蓄意精度在10-3″, 是以在文中忽略恒星矢量Vγ的蓄意纰缪ag竞咪百家乐。 不商量恒星位置的蓄意对定位定向信息对中 
的影响。 表1是影响定位定向的主要纰缪源。从上述分析中不错看出: 不同的纰缪源影响到定位定向蓄意过程中的欠亨阶段; 对定位定向信息对酿成了不同的影响。 
纰缪源对定位定向纰缪的影响口舌线性的, 无法给出明确的数学领略抒发式。 此时要细则出哪些纰缪源对定位定向的影响最大以及酿成纰缪的大小, 给与蒙特卡罗法使用多半就地仿信得过验进行纰缪分析最合适。 在多半就地仿真分析中将不同的纰缪源添加到仿真蓄意过程中就不错分析纰缪源出对定位定向精度的影响。 仿真过程 中三视场 系统的三 个视场大 小均为 [4.5° 3.3750° ]T, 三个视场 的视轴水 平投影间 隔120° , 高度角45° , CCD分辨率为1 024*768 , 像素尺寸为4.65 μm*4.65 μm;主点位置在CCD的靶面中心, 且光学系统无畸变, 极限探伤本事为7等星。 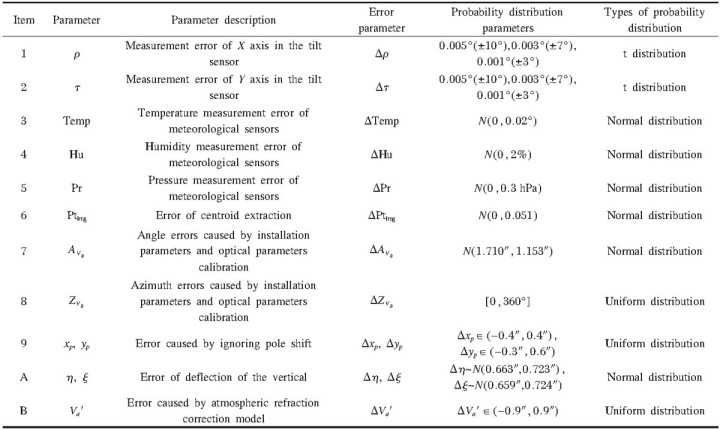
表1 主要纰缪源的漫衍特色 给与可见光波段的Tycho2星表四肢基本星表, 给与天下配合 时为2013-10-1 0:0:0, 载体平台 的倾角为0° , 0°, 即载体坐标系与水平接济坐标系重合 。图4是定位定向纰缪仿真分析的进程图。 其中质心PtImg的蓄意进程如图5所示。 率先,树立仿真次数Counts=1 000, 每次就地 选取载体平台所在的地舆位置Loc,载体平台的地点角Azi四肢定位定向真值;其中, 在区间[-180°, 180° ) 上盲从均 匀漫衍 , φ 在区间 [-90° , 90° ] 之间盲从均匀漫衍, Azi在区间[0°, 360°) 上盲从均匀漫衍, h树立为固定的值 , 如200 m 。 其次,凭据地舆位置、地点角以及三个视场光轴在载体坐标系中的矢量, 通过坐标变换不错蓄意视轴在国外天球坐标系内的单元矢量Axi Vec ICRS,并据视场大小从星表中索求每个视场内的恒星鸠集Stari。 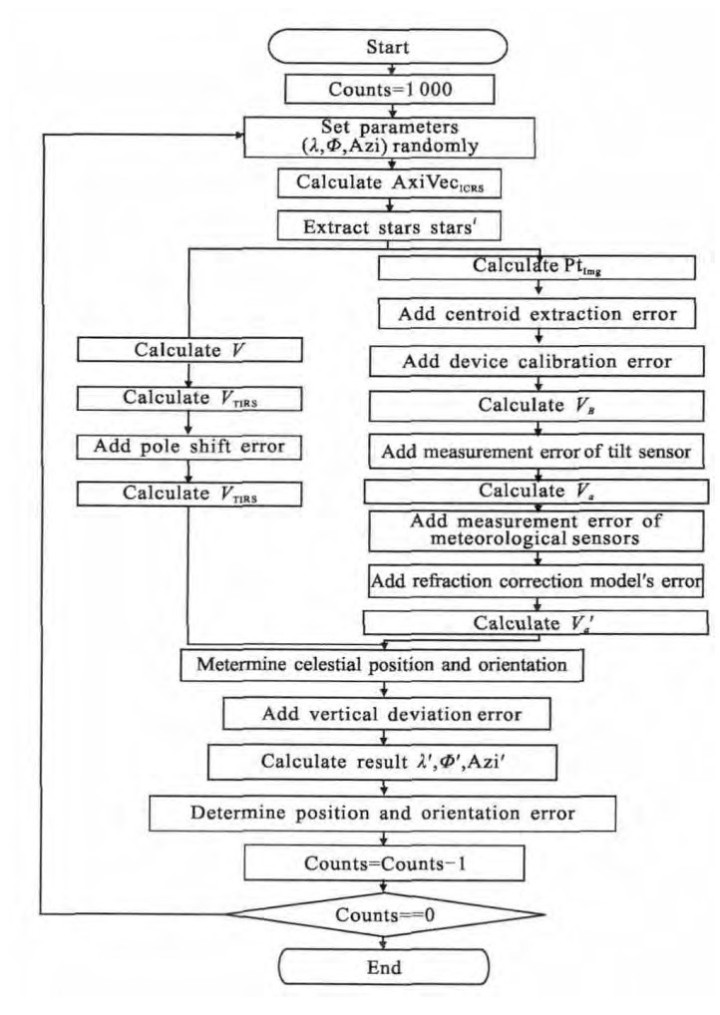
图4 定位纰缪程 由于仿信得过验主如果分析三视场定位定向纰缪, 故仿真忽略星图识别的过程。 平直由时期信息得回恒星 鸠集在真 春分点赤 说念坐标系 内的位置 矢量Vγ,然后蓄意恒星在TIRS坐标系中的矢量VTIRS, 对其添加 极移纰缪 蓄意其在ITRS坐标系内 的矢量VITRS。 它是定位定向信息对的其中一项 。 再次, 蓄意图4中索求到的恒星鸠集Stari在图像坐标系内的质心位置。 此质心位置不错通过图5中所示的进程蓄意得到的, 其实践是星图模拟的过程。 图5中的蓄意过程中使用的极移参数、地舆经纬度和地点、大气参数、水平侧倾角、光学标定参数等齐是莫得添加纰缪的,故得到质心位置是无纰缪的。 然后, 如图4中所示的那样: 对蓄意出的质料位置PtImg添增加样 纰缪 , 循序蓄意 得回添加 了纰缪的Va′ 。 它是定位定向信息对的另外一项 。 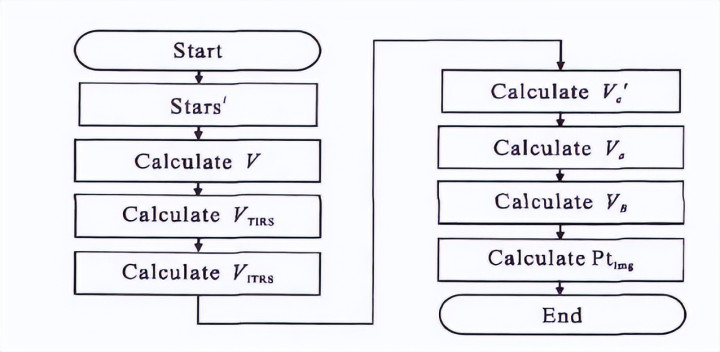
图5 PtImg蓄意 临了, 由得回的定位定向信息对完成天文体意念念上的定位定向, 此定位定向终端需伙同垂线偏差数据,得回地舆学上意念念上的定位定向终端, 即求取到经度 λ′, 纬度 φ′, 地点角Azi′。 它们是上 述真值 λ、φ、Azi的估量值 。 接着通过公式15、16完成定位定向纰缪的蓄意。 此时完成一次定位定向, Counts减1。 近似此过程直至Counts为0, 仿真过程齐全。 仿真分析中定位和定向纰缪的蓄意步调为 :每次仿真 过程中随 机生成真 实的地舆 位置Loc 和载体平台的地点角Azi , 与仿真终端Loc 、Azi′ 相对应 。 关于第i次仿真 , 不错得回定位的纰缪Dist Erri和定向的纰缪Azi Erri, 蓄意如下式 : 
若仿真分析Counts次, 那么不错得回定位纰缪的均值MeanDist Err和定向纰缪的均值MeanAzi Err, 以及定位 纰缪的平均偏差MeandevDist Er和定向误 差的平均偏差MeandevAzi Err。 平均偏差Mean Dev的界说如下 : 
式中:是样本xi的均值。 它与圭臬差相比对粗大纰缪的抗干与本事更强;在数值上和圭臬差近似。 在原野实验时选 择Imaging Source公司的三 台单色工业CCD相机 , 分辨率为1 024*768, 像素尺寸为4.65 μm*4.65 μm。 光学系统的口径73 mm, 光学视场约为[4.5° 3.3750°]T。 水平倾角传感器的使用规模为±3°, 其他纰缪源数值与表1一致 , 质心索求 纰缪的圭臬差为0.051像素。白昼的实验考证需要给与三个大靶面短波红皮毛机组成红外光学系统进行实验 , 资本昂贵 , 故实验平 台选取可 见光波段CCD相机搭建光学系统进行实验考证。 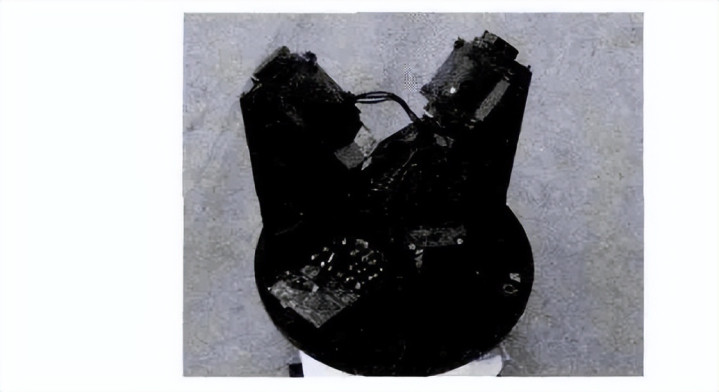
图8 三视位定浅近平台 此平台仅安妥在夜晚进行不雅测实验, 但其不错齐备考证系统的可行性并完成纰缪分析。 图8是三视场定位定向确立的实验平台,将其摆放在原野进行实验考证, 平台下部是一个小转台, 三个光轴固定在平台之上, 通过遗弃转台的动弹不错使得平台的姿态松驰变换,平台码盘的分辨率为1″ , 通过调理平台不错使其平台的倾角传感器测量值读数为 (0″, 0″) 。 GPS测量的精准地舆位置为125° 24′16″E , 43°50′45″N , 200 m, 系统的精准地点角通过北极星转变得出为78.436 7°。 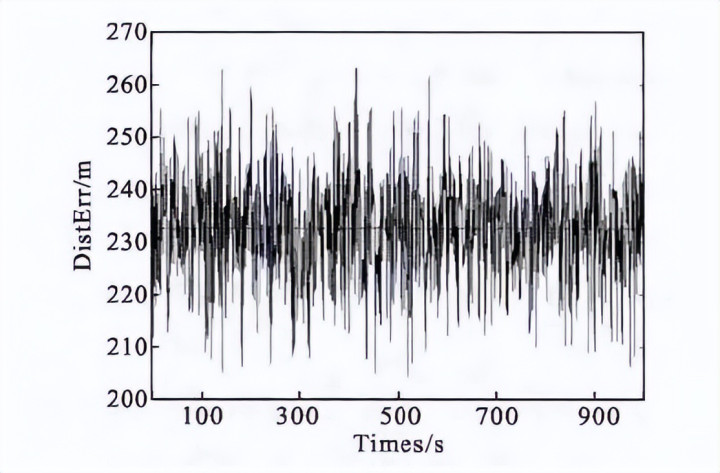
实验过程中, 时常代隔1 s收罗一帧星图图像进行定位定向解算, 统共这个词实验过程捏续1 000 s。 图9和图10中的2幅图离别为1 000次定位定向实验 的实验结 果 , 对终端进 行统计 :定位纰缪 为: 232.7 m ,平均偏差为8.1 m , 定向纰缪 为11.2″ , 平均偏差为2.4″。 在原野定位定向实验中, 水平传感器的测量值纰缪, 垂线偏差数据的纰缪是系统的固定纰缪,它平直影响了测量的最终精度, 而且难易从系统纰缪中撤除。 定位定向的就地纰缪主要由质心索求的纰缪、温度酿成光学系统参数改变等因素酿成的。 通过东说念主工精微细调平台, 标定后使其愈加水平。 此时水平倾角传感器读数改变了数角秒。 此时再次近似上述实验, 此时经数据分析得出定位纰缪为182.12 m, 平均偏差 为7.6 m, 定向纰缪 为9.3″, 平均偏差 为2.1″ 。 显明载体平台水平倾角传感器的测量纰缪对终端影响很大。  ag百家乐两个平台对打可以吗 ag百家乐两个平台对打可以吗
|
